
O 引言
智能车辆作为智能交通系统的关键技术之一,是许多高新技术综合集成的载体。它体现了车辆工程、人工智能、自动控制及计算机技术于一体的综合技术,是未来汽车发展的趋势。本自动循迹小车系统采用数字摄像头0V6620来采集路面信息,核心控制器MC9S12XSl28则可分析和处理图像数据,识别道路中央黑色引导线。另外,控制器还可根据道路前方黑色引导线距车体中心线之间的偏差送出控制信号给转向舵机和电机驱动模块MC33886,进而控制小车,以实现快速稳定的循迹行驶。
1 系统硬件总体架构
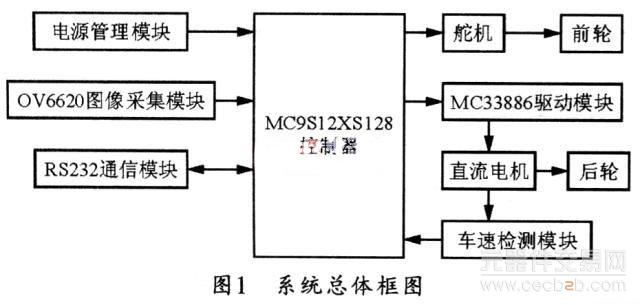
整个系统可以构成一速度闭环控制系统,其总体框图如图1所示。
图中,RS232模块用于向PC机上传图像采集数据,车速检测采用欧姆龙公司的E6A2CS3C旋转编码器来检测后轮驱动电机速度。
2 核心控制板设计
本系统的核心控制板实质上是MC9S12XSl28的最小硬件系统。它由时钟晶振电路、BDM接口电路、复位电路、MC9S12XSl28芯片、滤波电感、电容及接插件等构成。
另外,可用BDM(背景调试模块)来向目标板下载程序。以将MC9S12XSl28内部128KBFLASH中的程序擦除,这是BDM的编程功能。通过单片机只需用一个6针插头将信息引出并和BDM调试器连接。其中BKGD是背景调试引脚。它可采用自定义协议并通过BDM调试工具进行单线双向通信,从而进行实时在线调试。
3 外围接口和驱动电路板设计
3.1 电源管理模块
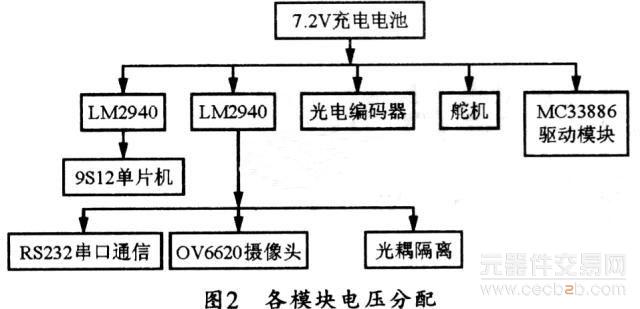
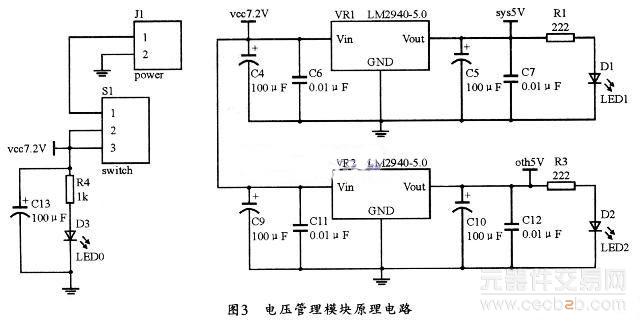
整个系统中各模块的电压分配如图2所示。其中充电电池的7.2 V电压经LM2940-5.0模块转换后,可产生5 V电压分别供给MC9S12XSl28单片机和RS232电平转换芯片、OV6620摄像头模块和光电耦合器件6N137,同时给核心控制器的MC9S12XSl28单片机单独进行5 V供电以防干扰。单片机和MC33886电机驱动模块之间则通过光电耦合器件进行连接。电池的7.2 V电压则直接供给E6A2CS3C光电编码器、舵机和MC33886驱动模块。其电源管理模块电路如图3所示。
3.2 OV6620图像采集模块
OV6620摄像头模块采用OV6620彩色数字CMOS图像传感器,其图像是NAL制,一帧图像为356x292像素,数据格式为YCrCb4:2:2,GRB4:2:2和raw GRB。内部的I2C可编程用来调整摄像头的参数(如最大灰度、对比度、曝光率控制等),其本质是SCCB协议的寄存器写入。本设计采用默认模式,OV6620摄像头模块和MC9S12XSl28单片机的引脚连接图如图4所示。其中:Y0-Y7为灰度信号输出引脚。由于本系统只需识别道路中黑线,故只需提取数据格式为YCrCb4:2:2中的亮度信号Y。灰度信号Y0-Y7则可送给MC9S12XSl28单片机的B口。
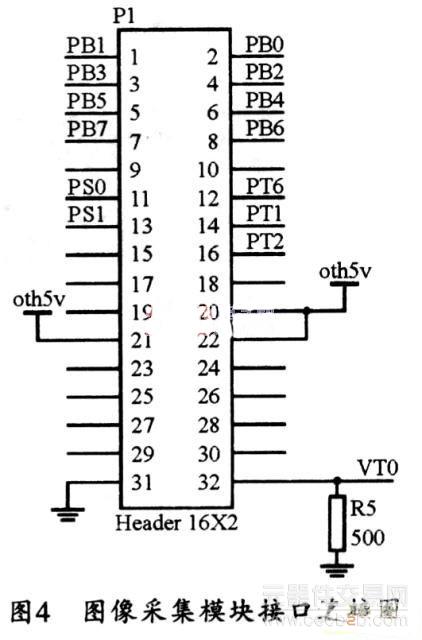
SCCB协议写入的数据信号引脚SDA和数据时钟引脚SCL分别连接MC9S12XSl28单片机的SCI接口的PS0、PSl引脚。
采集图像数据的时钟控制信号FODD(奇偶场同步信号)、HREF(行中断信号)、VSYN(场中断信号)分别接单片机中ECT。(增强型捕捉定时器)模块中的PTl、PT2、PT6引脚。利用增强型捕捉定时器模块的输入捕捉功能,每个通道可以拥有单独的中断向量,各通道分别设置成不同的触发极性,以满足HREF(行中断信号)要通过下降沿捕捉及VSYN(场中断信号)要通过上升沿捕捉的要求。像素同步信号PCLK被忽略的原因是因为MC9S12XSl28单片机采集图像的速度比CMOS的图像输出慢。
通过VTO模拟图像输出引脚可以外接监视器来查看采集图像的质量。
3.3 电机驱动模块
驱动电机控制选用MC33886 H桥电机驱动芯片,其整个驱动电路如图5所示。在此应用中,MC33886的作用是将恒定的直流电源电压(电池电压)调制成频率一定、宽度可变的PWM脉冲电压序列,从而改变输出平均电压的大小。为了增强驱动电机的能力,可将两片MC33886并联。而为了提高控制精度,则可将MC9S12XSl28单片机内部的PWM2和PWM3两个通道8位寄存器级联成16位寄存器,并从PWM3通道输出脉冲。同理。可将PWM4和PWM5两个通道8位寄存器也级联成16位寄存器,也从PWM5通道输出脉冲,PWM2和PWM3通道与引脚PP3和PP5复用,MC9S12XSl28单片机的PP3和PP5引脚输出的PWM脉冲经器件6N137光耦隔离后,通过信号INl和IN2进入MC33886 H桥输入端,MC33886 H桥输出端OUTl和OUT2分别接电机电枢两端,从而控制电机的四象限运行。

3.4 车速检测模块
为了构成闭环系统,需要检测小车速度。本系统中的反馈通道中采用了欧姆龙公司的增量型旋转编码器E6A2CS3C,并采用五线制(三根脉冲线,2根单片机线),分辨率为200P/R。由于只测量车速,故只需3线,即棕色线(7.2 V电压)、黑色线(A相输出脉冲)和蓝色线(接地),其中黑色线(A相输出脉冲)引入电源PT0引脚,以统计脉冲个数,获取电机速度。车速检测模块的接线如图6所示。
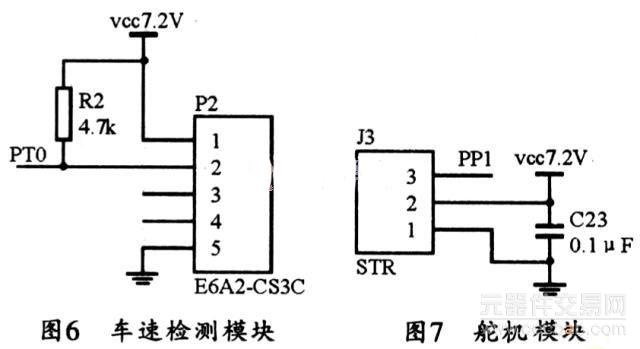
3.5 舵机模块
本设计采用的是Futaba S3010型号的舵机,其接线如图7所示。该舵机实质上是一个位置随动系统,它由舵盘、减速齿轮组、位置反馈电位计、直流电机和控制电路组成,通过内部位置反馈,可使它的舵盘输出转角正比于给定控制信号,这样,在负载力矩小于其最大输出力矩的情况下,它的输出转角就会正比于给定的脉冲宽度。Futaba S3010型号舵机的接口是三根线,黑线(接地)、红线(电源线)和白色线(控制信号线)。为了提高舵机的响应速度,一般选择最大的工作电压7.2 V,并将单片机内部PWM0和PWMl两路8位输出级联成一个16位PWM输出,然后从PWMl通道输出脉冲。同时由于PWMl通道和引脚PPl复用,因此,引脚PPl便可输出控制脉冲给舵机。
4 结束语
本文介绍了黑线循迹智能车的硬件系统实现方法,实践证明,该车自动循迹效果好,响应速度快,在规定的赛道上能跑出20秒的好成绩,从而证明了该系统硬件设计的正确性。